UAVSAR¶
Learning Objectives
A 30 minute guide to UAVSAR data for SnowEX
overview of UAVSAR data (both InSAR and PolSAR products)
demonstrate how to access and transform data
use Python rasterio and matplotlib to display the data

Intro slide deck: https://uavsar.jpl.nasa.gov/education/what-is-uavsar.html
Lead developer: Jack Tarricone, University of Nevada Reno, Other developers: Franz Meyer, University of Alaska Fairbanks and HP Marshall, Boise State University
# import libraries
import os # for chdir, getcwd, path.basename, path.exists
import hvplot.xarray
import pandas as pd # for DatetimeIndex
import rioxarray
import numpy as np #for log10, mean, percentile, power
import rasterio as rio
from rasterio.plot import show # plotting raster data
from rasterio.plot import show_hist #histograms of raster data
import glob # for listing files in tiff conversion function
import matplotlib.pyplot as plt # for add_subplot, axis, figure, imshow, legend, plot, set_axis_off, set_data,
# set_title, set_xlabel, set_ylabel, set_ylim, subplots, title, twinx
What is UAVSAR?¶
UAVSAR stands for uninhabited aerial vehicle synthetic aperture radar. It is a suborbital (airplane) remote sensing instrument operated out of NASA JPL.
frequency (cm) |
resolution (rng x azi m) |
swath width (km) |
|---|---|---|
L-band 23 |
1.8 x 5.5 |
16 |
Documentation:
NASA SnowEx 2020 and 2021 UAVSAR Campaings¶
During the winter of 2020 and 2021, NASA conducted an L-band InSAR timeseris at a seris of sites across the Western US with the goal of tracking changes in SWE. Field teams in 13 different locations in 2020, and in 6 locations in 2021, deployed on the date of the flight to perform calibration and validation observations.
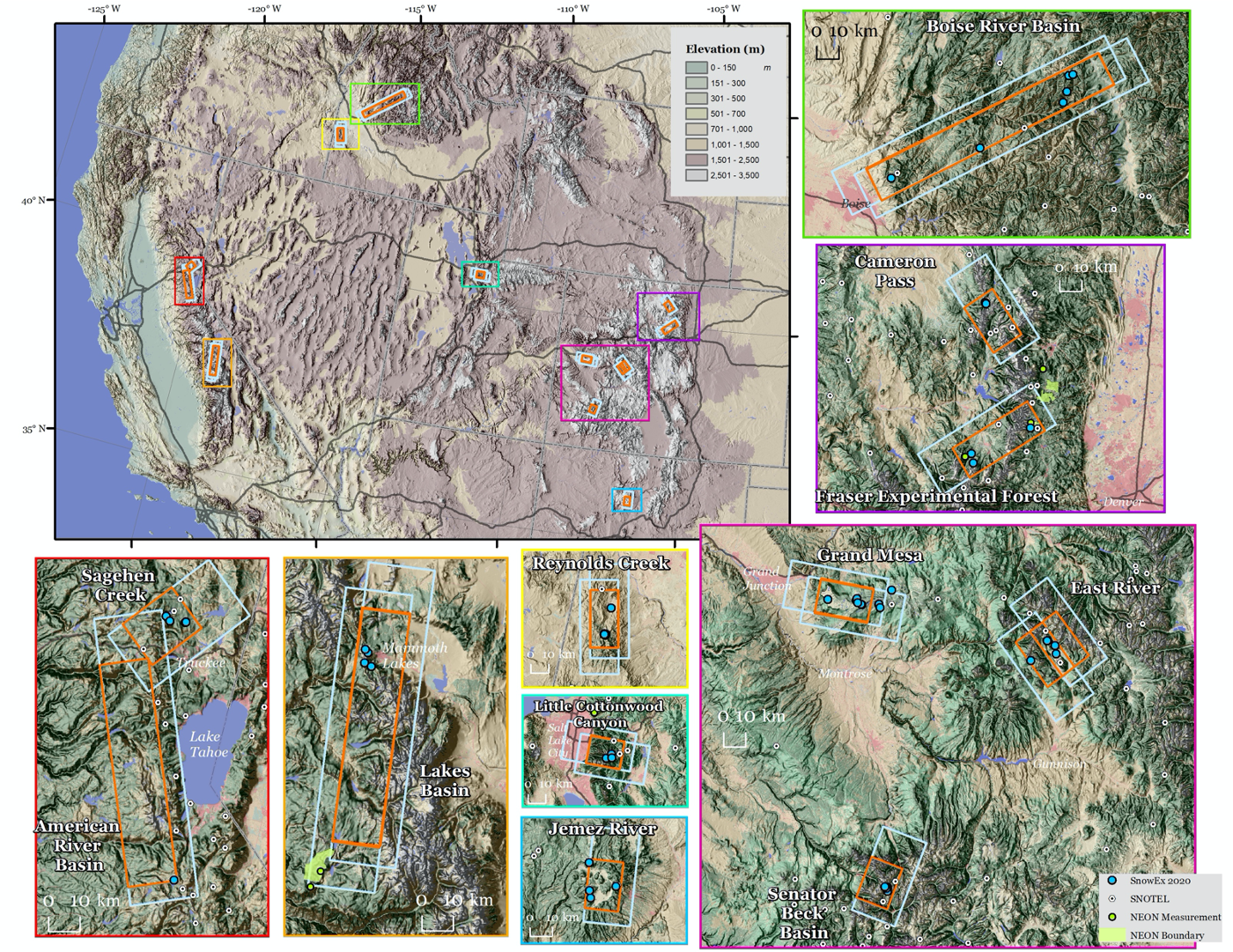
Fig. 8 Map of the UAVSAR flight locations for NASA SnowEx. Source: Chris Hiemstra¶
Data Access¶
There are multiple ways to access UAVSAR data. Also the SQL database.
InSAR Data Types
ANN file (.ann): a text annotation file with metadata
AMP files (.amp1 and .amp2): calibrated multi-looked amplitude products
INT files (.int): interferogram product, complex number format (we won’t be using these here)
COR files (.cor): interferometric correlation product, a measure of the noise level of the phase
GRD files (.grd): interferometric products projected to the ground in simple geographic coordinates (latitude, longitude)
HGT file (.hgt): the DEM that was used in the InSAR processing
KML and KMZ files (.kml or .kmz): format for viewing files in Google Earth (can’t be used for analysis)
Data Download¶
We will use our NASA EarthData credentials and ASF Vertex to download an InSAR pair data into our notebook directly. For this tutorial, we will be working with UAVSAR data from February of 2020. If you want to use different data in the future, change the links in the files variable. The screengrab below shows how I generated these download links from the ASF site.
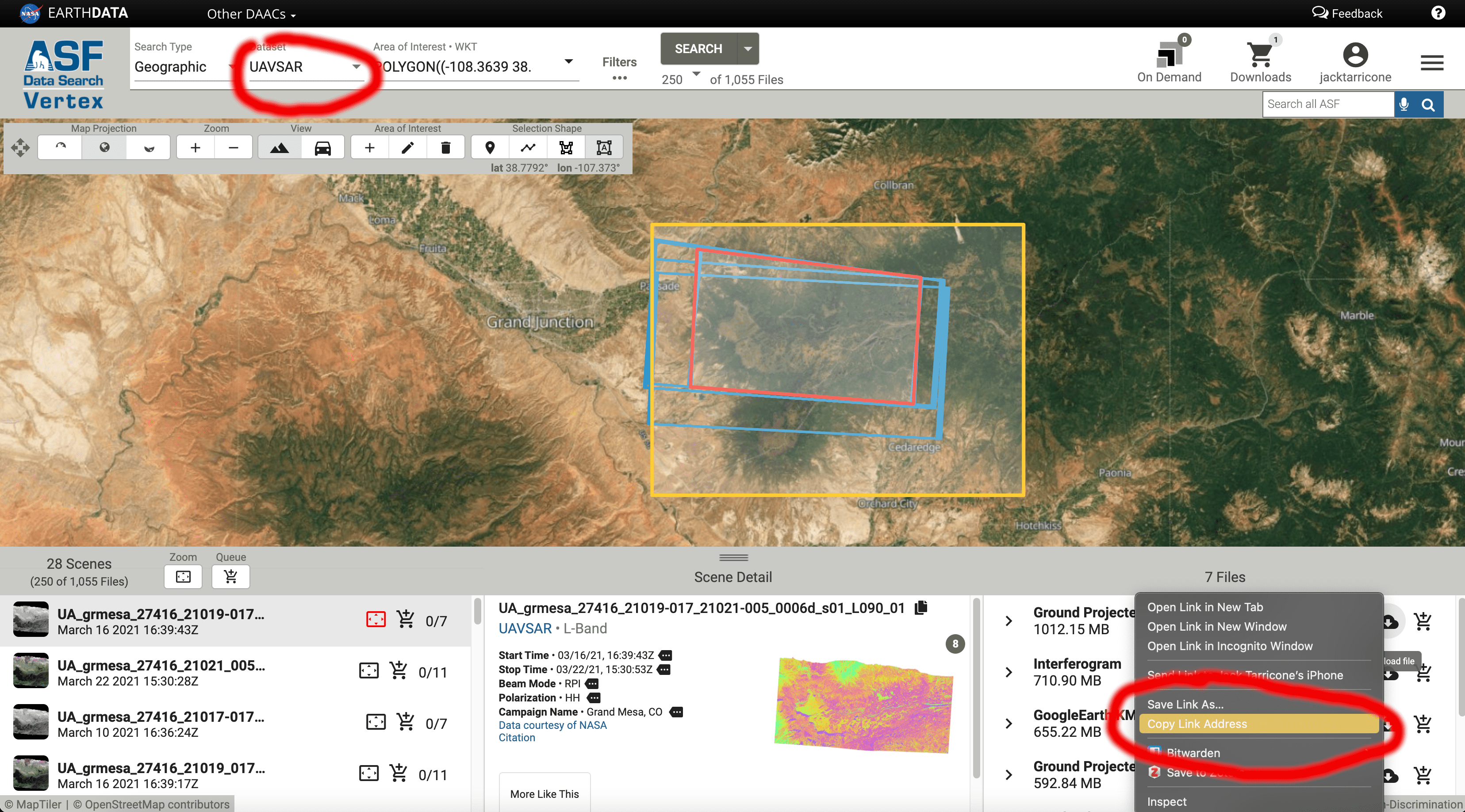
Fig. 9 Screenshot of ASF Vertex interface¶
Note
For efficiency, we’ve already downloaded and converted UAVSAR to a GIS-friendly Geotiff format for this tutorial. See the additional notebook for code and documentation: uavsar-download.ipynb
%%bash
# Retrieve a copy of data files used in this tutorial from Zenodo.org:
# Re-running this cell will not re-download things if they already exist
mkdir -p /tmp/tutorial-data
cd /tmp/tutorial-data
wget -q -nc -O data.zip https://zenodo.org/record/5504396/files/sar.zip
unzip -q -n data.zip
rm data.zip
# Change to tmp directory and download staged tutorial data
os.chdir('/tmp/tutorial-data/sar/uavsar/')
### inspect our newly created .tiffs, and create named objects for each data type. We'll use these new obects in the next step
# amplitude from the first acquisition
for amp1 in glob.glob("*amp1.grd.tiff"):
print(amp1)
# amplitude from the second acquisition
for amp2 in glob.glob("*amp2.grd.tiff"):
print(amp2)
# coherence
for cor in glob.glob("*cor.grd.tiff"):
print(cor)
# unwrapped phase
for unw in glob.glob("*unw.grd.tiff"):
print(unw)
# dem used in processing
for dem in glob.glob("*hgt.grd.tiff"):
print(dem)
grmesa_27416_20003-028_20005-007_0011d_s01_L090HH_01.amp1.grd.tiff
grmesa_27416_20003-028_20005-007_0011d_s01_L090HH_01.amp2.grd.tiff
grmesa_27416_20003-028_20005-007_0011d_s01_L090HH_01.cor.grd.tiff
grmesa_27416_20003-028_20005-007_0011d_s01_L090HH_01.unw.grd.tiff
grmesa_27416_20003-028_20005-007_0011d_s01_L090HH_01.hgt.grd.tiff
Inspect the meta data the rasters using the rio (shorthand for rasterio) profile function.
unw_rast = rio.open(unw)
meta_data = unw_rast.profile
print(meta_data)
{'driver': 'GTiff', 'dtype': 'float32', 'nodata': None, 'width': 7014, 'height': 4768, 'count': 1, 'crs': CRS.from_epsg(4326), 'transform': Affine(5.556e-05, 0.0, -108.30355248000001,
0.0, -5.556e-05, 39.19030164), 'tiled': False, 'interleave': 'band'}
Opening and plotting the raw UAVSAR raster files¶
We now have our five different data sets: the two amplitude files, coherence, unwrapped phased, and the DEM. We will not be working the actual interferogram (.int) file because it contains complex numbers that don’t work in the Python packages being used.
Here we will open a raster files using the rio.open() function. We’ll then create a simple plot using the rio show() function.
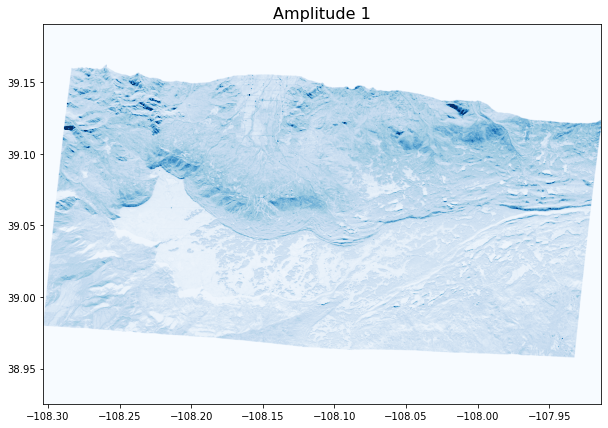
Amp 1¶
amp1_rast = rio.open(amp1) #open raster
fig, ax = plt.subplots(figsize = (10,7)) #define figure size
ax.set_title("Amplitude 1",fontsize = 16); #set title and font size
show((amp1_rast, 1), cmap = 'Blues', vmin = 0, vmax = 1); #plot, set color type and range
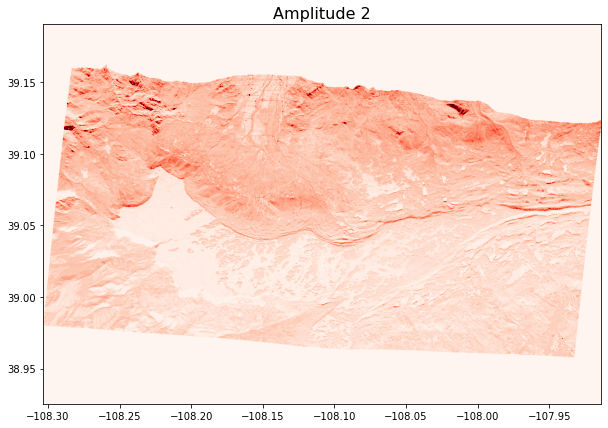
Amp 2¶
amp2_rast = rio.open(amp2)
fig, ax = plt.subplots(figsize = (10,7))
ax.set_title("Amplitude 2",fontsize = 16);
show((amp2_rast, 1), cmap = 'Reds', vmin = 0, vmax = 1);
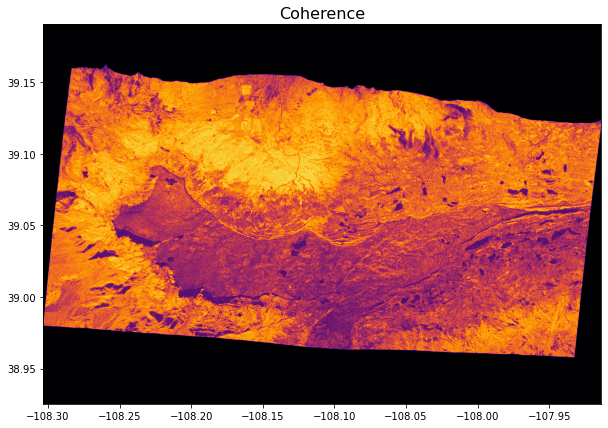
Coherence¶
cor_rast = rio.open(cor)
fig, ax = plt.subplots(figsize = (10,7))
ax.set_title("Coherence",fontsize = 16);
show((cor_rast, 1), cmap = 'inferno', vmin = 0, vmax = 1);
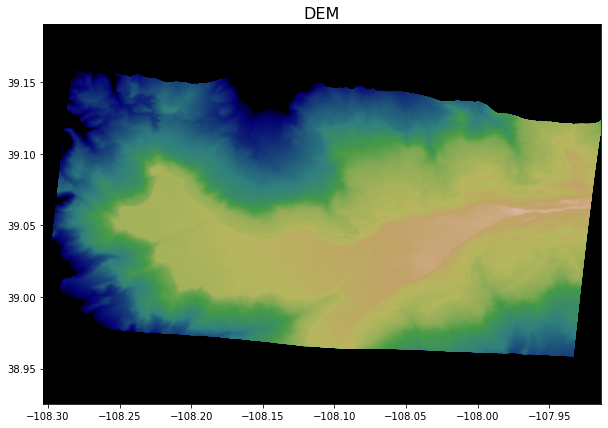
DEM¶
Now we’ll make a quick histogram using rio show_hist() to check what we should set the bounds of the color scale to.
dem_rast = rio.open(dem)
show_hist(dem_rast, bins = 50)
fig, ax = plt.subplots(figsize = (10,7))
ax.set_title("DEM",fontsize = 16);
show((dem_rast, 1), cmap = 'gist_earth', vmin = 1900, vmax = 3600); #estimated these values from the histogram
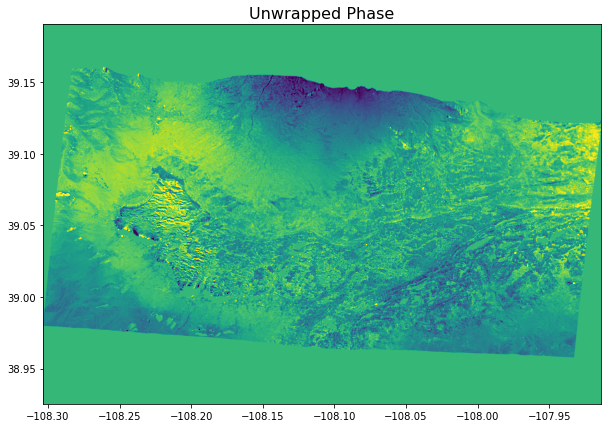
Unwrapped Phase¶
Another histogram for the color bounds, and note the large amount of 0’s values. This is will become imporant in the next few steps.
unw_rast = rio.open(unw)
show_hist(unw_rast, bins = 50)
unw_rast = rio.open(unw)
fig, ax = plt.subplots(figsize = (10,7))
ax.set_title("Unwrapped Phase",fontsize = 16);
show((unw_rast, 1), cmap = 'viridis', vmin = -3, vmax = 1.5); # info from histogram
Formatting the data for visualization¶
The plots of the raw data need some work. Some fotmatting is necessary to visualize the data clearly. UAVSAR uses “0” as it’s no data value (not the best practice in general) for amplitude, coherence, and unwrapped phase. For the DEM -10000 is the no data value. Using -9999 or another value that is obviously not actual data is a better practice with spatial data to limit confusion. We’ll convert these no data values to NaN (Not a Number) which will remove the boarders around data, and in data lost the unwrapping in the UNW file.
Amplitude formatting¶
For the two amplitude files we need to do two things. Convert from the linear amplitude scale to decibel (dB) and change the 0 values to NaN. To do this we’ll convert our raster file to an np.array to manipulate it. Note that when we convert the raster data to an array, the spatial coordinates are lost and it no longer plots the x and y scales at longitude and latitude values. For our purposes this okay, but you would need to convert back to a .tiff if you wanted to save the file to use in ArcGIS or QGIS.
# amp1
# open raster as a data array
with rio.open(amp1) as amp1_raw:
amp1_array = amp1_raw.read(1) #open raster as an array
# convert all 0's to nan
amp1_array[amp1_array == 0] = np.nan # convert all 0's to NaN's
# convert to dB
amp1_dB = 10.0 * np.log10(amp1_array) # convert to the dB scale
# amp2
with rio.open(amp2) as amp2_raw:
amp2_array = amp2_raw.read(1)
amp2_array[amp2_array == 0] = np.nan
amp2_dB = 10.0 * np.log10(amp2_array)
show_hist(amp2_dB, bins = 100)
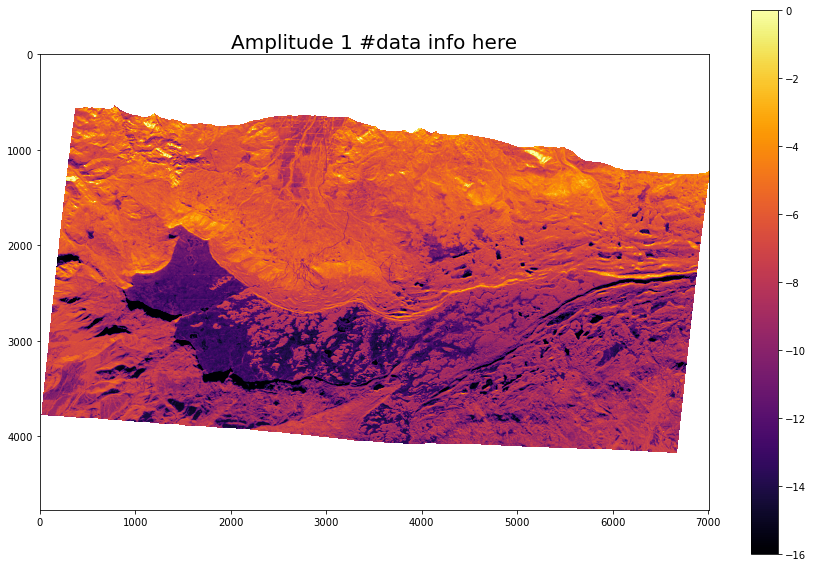
Instead of using the rio.show() function, we’ll try out the matplotlib (we are calling plt) im.show() style of plotting to implement a color scale.
fig, ax = plt.subplots(figsize=(15, 10))
ax.set_title("Amplitude 1 #data info here", fontsize= 20) #title and font size
amp2_plot = ax.imshow(amp2_dB, cmap='inferno',vmin=-16, vmax=0) #set bounds and color map
# add legend
colorbar = fig.colorbar(amp2_plot, ax=ax) #add color bar
plt.show()
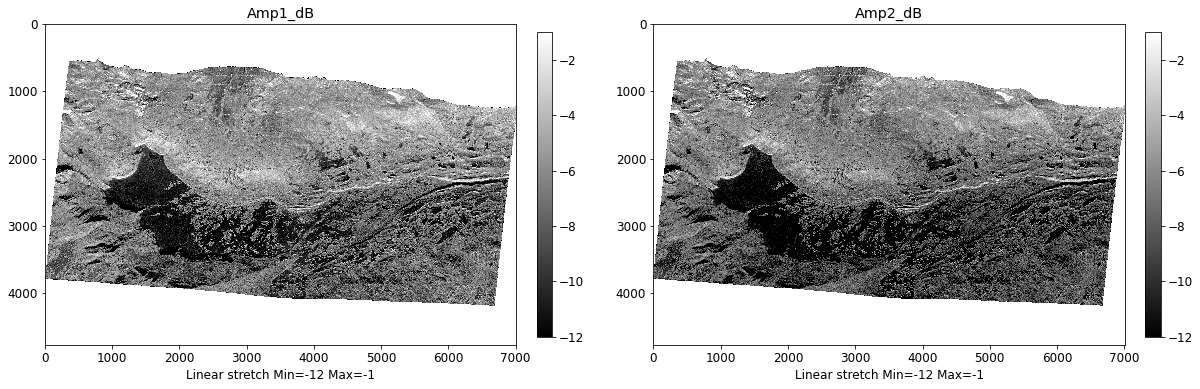
Now we’ll create a function called show_two_images() to plot two images at once. The function inputs are a data array, color map name, and a plot title for both images. It uses np.nanpercentile() to automatically set the color scale bounds, but you can also set them manually.
# function for showing two images using matplotlib
plt.rcParams.update({'font.size': 12}) # set fontsize
def show_two_images(img1, img2, col1, col2, title1, title2, vmin1=None, vmax1=None, vmin2=None, vmax2=None):
fig = plt.figure(figsize=(20, 20))
ax1 = fig.add_subplot(121)
ax2 = fig.add_subplot(122)
# auto setting axis limits
if vmin1 == None:
vmin1 = np.nanpercentile(img1, 1)
if vmax1 == None:
vmax1 = np.nanpercentile(img1, 99)
# plot image
masked_array1 = np.ma.array(img1, mask=np.isnan(0)) #mask for 0
plt1 = ax1.imshow(masked_array1, cmap=col1, vmin=vmin1, vmax=vmax1, interpolation = 'nearest') #fixes NaN problem
ax1.set_title(title1)
ax1.xaxis.set_label_text('Linear stretch Min={} Max={}'.format(vmin1, vmax1))
# add color scale
colorbar = fig.colorbar(plt1, ax=ax1, fraction=0.03, pad=0.04)
# auto setting axis limits
if vmin2 == None:
vmin2 = np.nanpercentile(img2, 1)
if vmax2 == None:
vmax2 = np.nanpercentile(img2, 99)
# plot image
masked_array2 = np.ma.array(img2, mask=np.isnan(0)) #mask for 0
plt2 = ax2.imshow(masked_array2, cmap=col2, vmin=vmin2, vmax=vmax2, interpolation = 'nearest')
ax2.set_title(title2)
ax2.xaxis.set_label_text('Linear stretch Min={} Max={}'.format(vmin2, vmax2))
colorbar = fig.colorbar(plt2, ax=ax2, fraction=0.03, pad=0.04)
plt.show()
# plot both amplitude images
show_two_images(amp1_dB, amp2_dB, 'gray', 'gray', 'Amp1_dB', 'Amp2_dB', -12,-1,-12,-1)
Coherence, Unwrapped Phase, DEM¶
For these three data types, we only need to convert no data values (0) to NaN.
with rio.open(cor) as cor_raw:
cor_array = cor_raw.read(1)
cor_array[cor_array == 0] = np.nan # convert all 0's to nan
# unw
with rio.open(unw) as unw_raw:
unw_array = unw_raw.read(1)
unw_array[unw_array == 0] = np.nan
# dem
with rio.open(dem) as dem_raw:
dem_array = dem_raw.read(1)
dem_array[dem_array == -10000] = np.nan #different no data value
Checking to see if it worked by comparing unw_rast which still includes 0’s to unw_array where we changed them to NaN.
show_hist(unw_rast, bins = 100)
show_hist(unw_array, bins = 100)
plt.rcParams.update({'font.size': 12}) # set fontsize
show_two_images(dem_array, unw_array, 'gist_earth', 'viridis', 'DEM (m)', 'UNW (radians)')
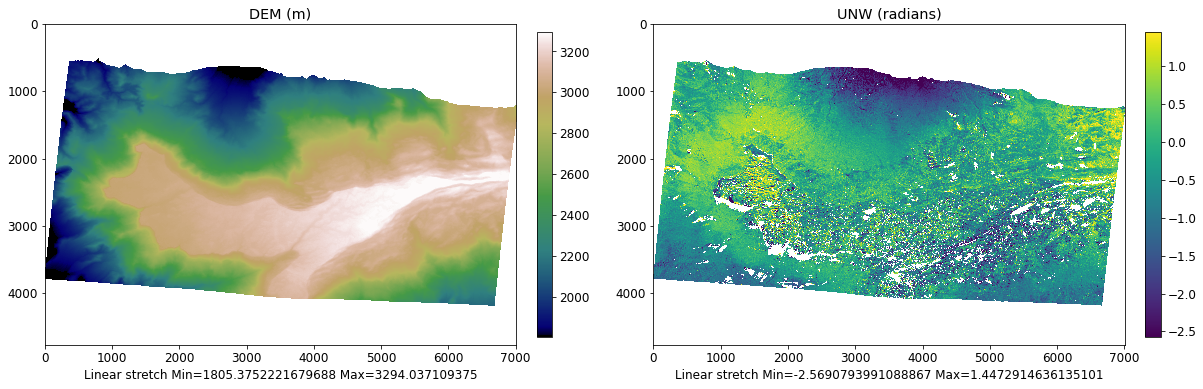
Let’s plot the UNW raster larger so we can get a better look at the detail.
plt.rcParams.update({'font.size': 16}) # increase plot font size for larger plot
fig, ax = plt.subplots(figsize=(40, 20))
masked_array = np.ma.array(unw_array, mask = np.isnan(0)) # mask for 0
ax.set_title("UNW (radians)", fontsize= 20) #title and font size
img = ax.imshow(masked_array, cmap = 'viridis', interpolation = 'nearest', vmin = -2.5, vmax =1.5)
# add legend
colorbar = fig.colorbar(img, ax=ax, fraction=0.03, pad=0.04) # add color bar
plt.show()
plt.rcParams.update({'font.size': 12}) # change font back to normal
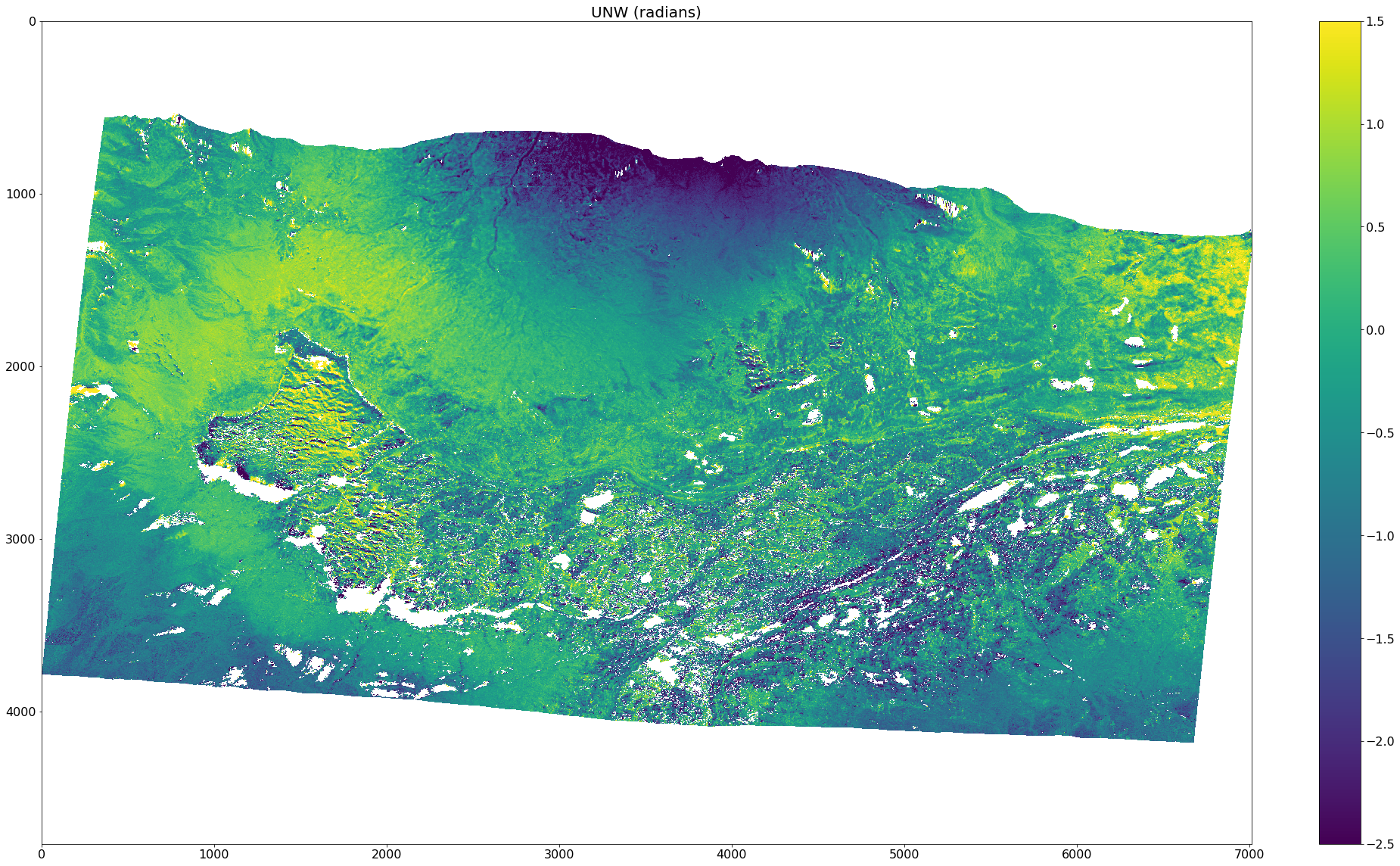
This looks much better! Plotting the image at a larger scale allows us to see an accurate representation of the data.
LiDAR depth change vs InSAR Phase change Comparison¶
The SnowEx 2020 campaign conducted a pair of LiDAR and InSAR flights over Grand Mesa on February 1st and 13th. The purpose of the paired data collected was to test the UAVSAR L-band InSAR SWE/Depth change technique against the LiDAR depth change retrievals. LiDAR is proven to work exceptionally well for measuring snow depth changes, so this provides an opportunity to validate the InSAR data.
lidar_dc = '/tmp/tutorial-data/sar/uavsar/gmesa_depth_change_02-01_02-13.tif' #path to lidar depth change raster
# print meta data, and check to see if the raster has a no data value
lidar_rast = rio.open(lidar_dc)
meta_data = lidar_rast.profile
print(meta_data)
{'driver': 'GTiff', 'dtype': 'float32', 'nodata': -3.4e+38, 'width': 7576, 'height': 3528, 'count': 1, 'crs': CRS.from_epsg(32612), 'transform': Affine(3.0, 0.0, 737454.0,
0.0, -3.0, 4330218.0), 'tiled': False, 'compress': 'lzw', 'interleave': 'band'}
We can see this raster has a no data value of 'nodata': -3.4e+38 set (most of the UAVSAR ones did not). Therefore we can read it in with the masked=TRUE command to automatically mask out the no data pixels.
with rio.open(lidar_dc) as dataset:
lidar_masked = dataset.read(1, masked=True)
# quick test plot
fig, ax = plt.subplots(figsize = (30,8))
ax.set_title("LiDAR Depth Change",fontsize = 16);
show((lidar_masked), cmap = 'RdBu', vmin = -.3, vmax = .3)
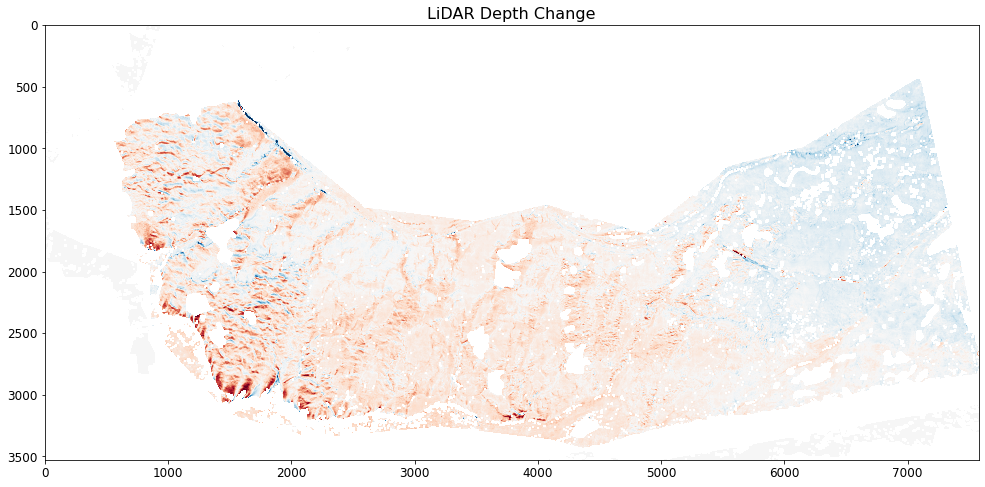
<AxesSubplot:title={'center':'LiDAR Depth Change'}>
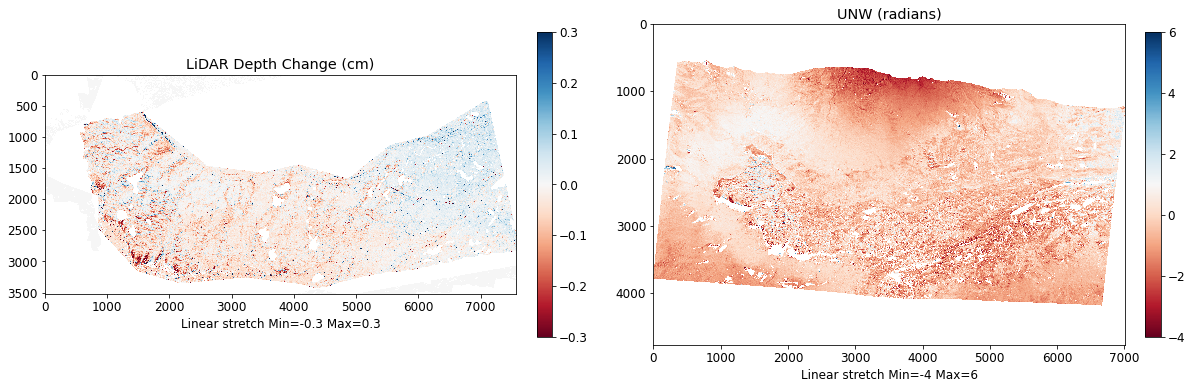
LiDAR vs UNW¶
Using show_two_images(), we can plot the LiDAR depth change and UNW images next to each other to compare them.
show_two_images(lidar_masked, unw_array, 'RdBu', 'RdBu', 'LiDAR Depth Change (cm)', 'UNW (radians)', vmin1 = -.3, vmax1 = .3, vmin2=-4, vmax2=6)
/srv/conda/envs/notebook/lib/python3.8/site-packages/matplotlib/colors.py:1202: RuntimeWarning: overflow encountered in true_divide
resdat /= (vmax - vmin)
The two rasters cover different areas, are different resolutions, and have different missing pixels. Let’s zoom into the top left corner of Grand Mesa where there was significant wind drifting to compare the two data sets.
show_two_images(lidar_masked[700:1700,700:1700], unw_array[2150:2750,1300:1900],
'RdBu', 'RdBu', 'LiDAR Depth Change (cm)', 'UNW (radians)', vmin1 = -.3, vmax1 = .3, vmin2=-4, vmax2=6)
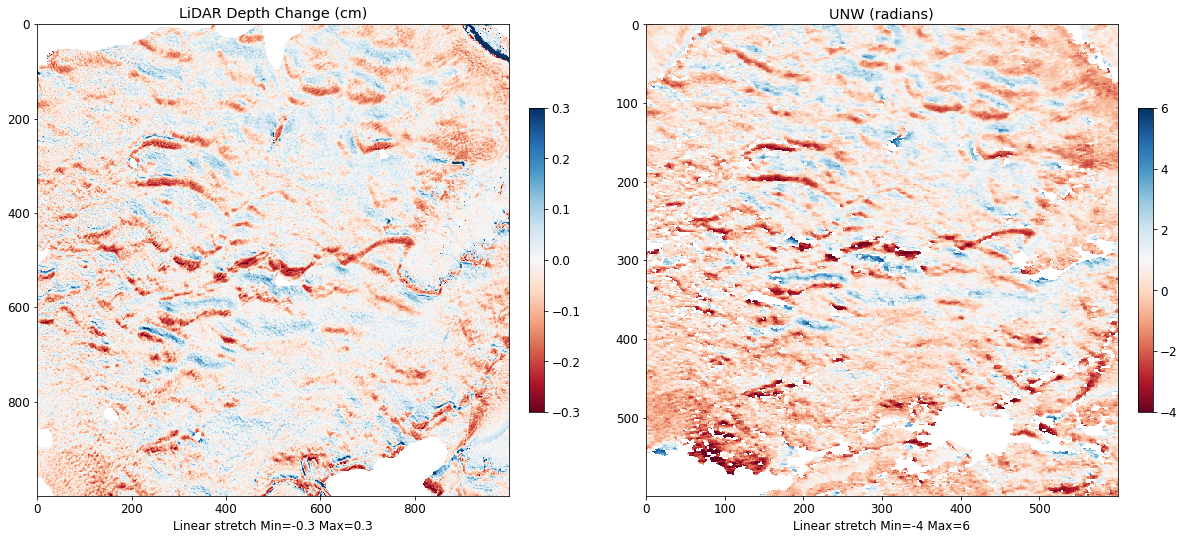
As you can see in the two plots above, there is a very strong spatial relationship between LiDAR depth change and InSAR change in phase. This relationship is the basis of measuring changes in SWE using L-band InSAR. While we don’t get into the next step of converting phase change to SWE or depth change from InSAR, we will get into that in the UAVSAR project!